Home > Product > DCS control system > ABB SPDSI13 DI Module

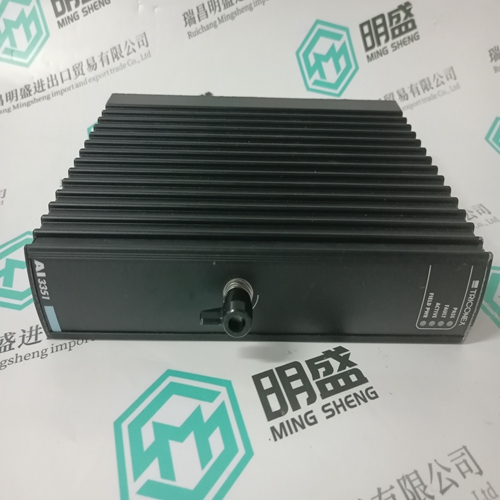
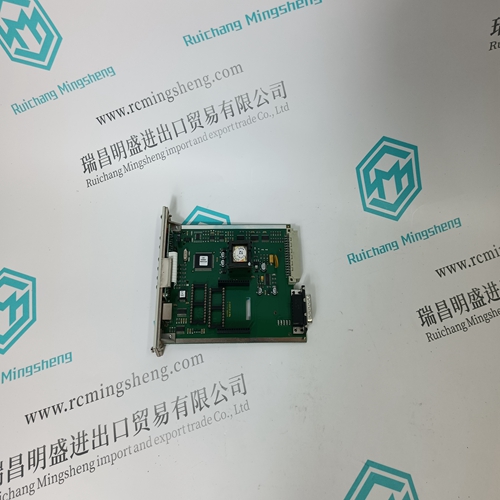
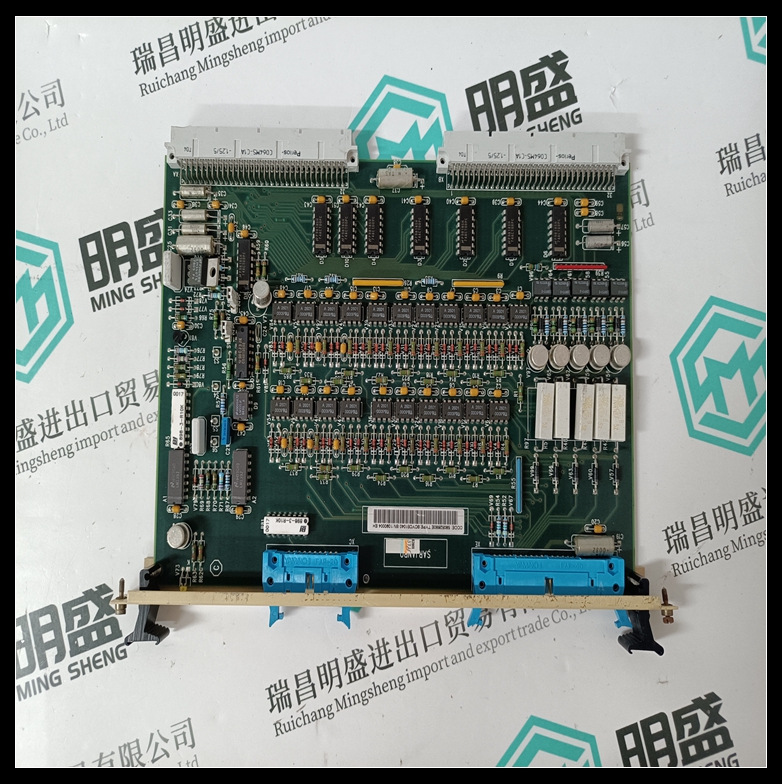
ABB SPDSI13 DI Module
- Product ID: SPDSI13
- Brand: ABB
- Place of origin: The Swiss
- Goods status: new/used
- Delivery date: stock
- The quality assurance period: 365 days
- Phone/WhatsApp/WeChat:+86 15270269218
- Email:stodcdcs@gmail.com
- Tags:ABBSPDSI13DI Module
- Get the latest price:Click to consult
ABB SPDSI13 DI Module
The Proportional Position Loop Gain “KPP” is set based on velocity BW of 75Hz. The velocity command from the position loop is generated from position error and KPP. For larger values of KPP, the velocity command is larger for a given position error. KPP provides position synchronization with a small constant position error while following a position command frequency. The position error will be proportional to the speed command by the value of KPP. If KPP is set too large compared to velocity BW, you can see velocity overshoot or oscillation, similar to a large KVI.
Feedforward Gain
The Velocity Feedforward Gain “KVFF” is used in applications that require near zero position error. KVFF is implemented in parallel with KPP to inject additional velocity command without requiring position error. If KVFF = 100 percent, the position command frequency is sent directly to the velocity loop as an open loop command. Instead of driving velocity with position error on top of zero speed, KVFF allows us to drive velocity with position error on top of target speed with nominally zero error. KVFF typically causes overshoot, and only helps in applications that require position synchronization, like electronic gearing
Manual Tuning with SoftScope
Refer to Appendix B for additional details. Velocity Loop Procedure 1. Create New Configuration for correct motor and drive models using 830 Tools. Use the default setup, including inertia ratio of 1:1 for the Step and Direction mode of operation. 2. In the LoopGains tab of the parameter edit window set KVI, KPP, and KVFF

Brand display
ABB、GE/FUANC、FOXBORO、TRICONEX 、BENTLY、A-B、EMERSON 、MOTOROLA、XYVOM、HONEYWELL 、REXROTH、KUKA、NI、DEIF、Yokogawa、WOODWARD、Reliance Electric、SCHNEIDER 、MOOG、PROSOFT、KOLLMORGEN、ICS TRIPLEX、HIMA
This article from the temporal Ming sheng automation equipment co., LTD., reproduced please attach this link: http://www.stockdcs.com/